

ロボットを動かそう 
![]()
ロボットの旋回
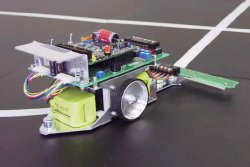
ロボットは、片方の車輪速度が遅くなると、遅くなった車輪の方向に旋回します。
左右に旋回
ロボットの旋回半径は、左右車輪の間隔(トレッド)と内輪と外輪との車輪回転速度により決定されます。車輪回転速度と旋回半径との関係は、
です。したがって、ロボットを旋回させたい半径によって速度設定すれば、滑らかな旋回が可能です。ステッピングモータを使用すれば、正確な回転速度の設定が比較的簡単に実現できます。
ロボットの旋回
ロボットを動かすことに慣れてきたら、滑らかに動かすために車輪の回転速度を徐々に変化させるとよいでしょう。
モータ運転速度カーブ
2001.10