

ロボットを動かそう 
![]()
ロボットはどう動く?
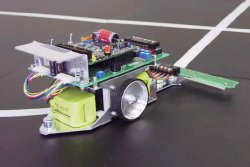
エフテックロボットは、車輪走行型ロボットです。台車の左右に動輪を配置した、左右二輪速度差方式を採用しています。
左右二輪速度差方式は、前進、後退、左右旋回、その場回転など多彩な走行が可能な操舵方式です。
旋回
その場回転(極地転回)
ロボットは、左右車輪の回転速度が等しければ前進(後退)します。
左が右より遅ければ左に旋回、右が左より遅ければ右に旋回します。
左右輪が逆回転すると、その場で回転します。
エフテックロボットは、電池でモータを駆動し車輪を回します。そのモータは、マイクロコンピュータにより回転スピードや回転量を制御します。
エフテックロボットは、赤外線センサを搭載しています。ロボットは、マイコンとセンサにより目標位置とのずれを検出し、常に位置修正しながら進むことが可能です。
2001.10