

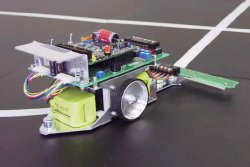
ロボットを動かそう 
![]()
ステッピングモータを廻す1
ステッピングモータの原理
エフテックのマイクロマウスとトレースロボットはステッピングモータを採用しています。
ステッピングモータは、回転軸に取付けられた磁石と固定された電磁石で構成されています。電磁石に電流を流して磁化し、回転軸の磁石を引きつけることで回転します。A、Bの順に電流を流すと正回転し、B、Aの順にすると逆回転します。電磁石を切替える間隔を短くすればモータは速く回り、間隔を長くすると遅く廻ります。切り替えをせずにモータコイルに電流を流しているときは、磁化している電磁石のところで位置を保持します。
1相励磁
ステッピングモータの回転軸は、モータコイルにパルスを与えるたびにステップ(階段)状に変化します。決まった角度だけまわってくれるので、ロボットで扱うとき便利です。
ステッピングモータの励磁の方法には、コイルを1相ずつ励磁する“1相励磁”、2相づつ励磁する“2相励磁”、1相2相交互にする“1-2相励磁”があります。1相励磁より2相励磁の方が動作する電磁石が多い分高いトルクを発生します。1-2相励磁は、半分のステップ角で回転するので、振動が少なくなります。競技用ロボットでは、2相励磁がよく利用されています。
2相励磁
1-2相励磁
エフテックロボットのモータは、HB(ハイブリッド)タイプと呼ばれる高トルクのモータを採用おり、1ステップで1.8度回転します。
2相HBモータ原理図
実際のHB型モータ内部はこのようになっています。

ステッピングモータの回路記号は、本などによって描き方が変わりますが、基本的にはどれも同じです。取り違えないように注意してください。
 |
 |
ステッピングモータには、電磁石を5組備えた5相モータもありますが、駆動回路が複雑になるため、競技用ロボットではほとんど利用されていません。産業用には幅広く使われています。
2001.10