

ロボットを動かそう 
![]()
ロボットとの通信
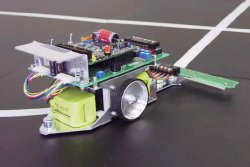
エフテックロボットは、シリアル通信端子を備えています。パソコン上で作成されたロボット用プログラムは、シリアル通信を通じてパソコンからロボットに転送して利用します。
通信機能を使えば、プログラム転送だけでなく、パソコンと接続してロボット動作時のデータを読取ることも可能です。

パソコンとPCの接続
パソコンと通信すれば、LEDやスピーカー音からでは判断できない細かな状態を知ることができ、デバックに便利です。
ロボット側プログラムでは、C言語のprintf関数、scanf関数を使うことができます。パソコン側はターミナルソフトを用いて、データ表示をします。
通信例
たとえばマイクロマウスでは、迷路内を走ったときの壁センシングデータをパソコンに送ると、デバックがしやすくなります。表計算ソフトを利用してセンサデータをグラフ化したものを下図に示します。壁に近づいた、離れた、柱の横を通過したなど、センサ情報が一目瞭然です。ビデオカメラでロボットの動きを撮影し、グラフと対応させながらデバックするとより効果的なロボット開発ができます。
直線走行時のマウス測距センサのデータ例
2001.10