

![]()
 |
ご好評のP-ROBOに新しい仲間が加わりました
ロボット制御を体験したい方へお奨め
メカトロニクス、マイコンプログラム学習の入門機
電子回路の学習や測定器の実習用に測定端子を用意

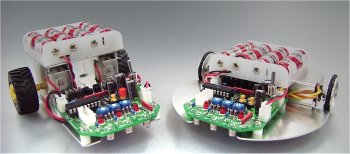
皆様よりご好評のP-ROBOの新しい仲間。P-ROBO2は、より理解しやすいロボットを目指しました。電子回路を中心としたハードウェア、マイコンプログラムによるソフトウェアの両面から学べます。
従来からのP-ROBOギヤBOXを利用したベーシックタイプと新たに設計したギャードDCコアレスモータ搭載台車のアドバンスドタイプの2機種をリリース。どちらもFET Hブリッジによるモータドライバを搭載しており、PWM制御で効率よくモータを正逆回転可能です。
PIC16F84Aマイコン採用
オンボードプログラミング方式
専用のプログラムライタを利用すればPICマイコンの抜き差しなしにプログラム書き換えが可能です。
完全学校週休2日制の体験学習にもどうぞ

ベーシックタイプには完成版と組立てキットをご用意。半田ゴテを利用した組立も体験できます。

工場出荷時にサンプルプログラムをPICマイコンに書込んであります。電池も付属していますので、買ってすぐにP-ROBO2を楽しむことが可能です。
- ご紹介 - |
|
ロボット参考書が刊行されています。 「ロボットコントロール」「PICマイコンによるロボット製作入門」(オーム社刊)のサンプルプログラムを動かすために「F0227、F0279」プログラムライタを利用できます。 WEBサイト:オーム社 |
|
雑誌「新電気」2005年3・4月号(オーム社刊)に「P-ROBOシリーズ」が掲載されています。 WEBサイト:オーム社 |
| NECラーニング様の組込みシステム開発演習セミナーの教材としてP-ROBO2が利用されています。 WEBサイト:NECラーニング |
| 技術評論社様のPICで動かすロボット制御セミナーの教材としてP-ROBO2が利用されています。 WEBサイト:技術評論社 |
プログラムの開発環境は、CPUメーカーのMicrochip社にて無償で利用できる環境が公開されています。
MPLAB IDE v8.92 や MPLAB X IDE をダウンロードしてご利用ください。
WEBサイト:Microchip社
◆ BASIC TYPE ◆
Model
No.F0209-BAS <完成品>
Model No.F0209-BAS-H ハーフキット <メカ部は組立キット・マイコンボード組立済>
Model No.F0209-BAS-F フルキット <メカ部、マイコンボードとも組立キット>
完成品、メカ部のみ組立キットとなった“ハーフキット”(半田付け不要)、全てが組立キットの“フルキット”(半田付けの作業が必要)の3種類の中からお選びいただけます。
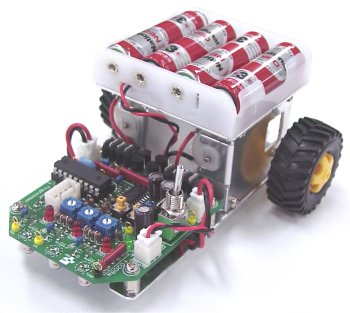
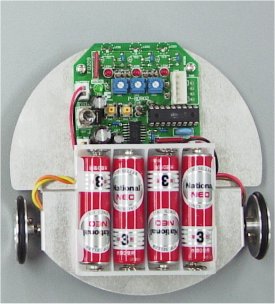
P-ROBO2ベーシックタイプ
従来からのP-ROBOギヤBOXを利用したロボット入門版
効率改善特注マブチモータ(仙台「メカトロで遊ぼう会」梵天丸用)使用
基本的な解説およびサンプルプログラムを収録したCDが付属します。
 [詳細を見る]
[詳細を見る]■ 販売価格
完成品 ¥13,200(税込)
ハーフキット ¥11,550(税込)
フルキット ¥10,450(税込)
◆ ADVANCED TYPE ◆
Model No.F0209-ADV<完成品>
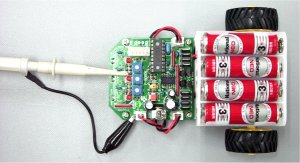
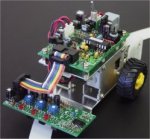
P-ROBO2アドバンスドタイプ
狭山精密製ギャードDCコアレスモータ採用し、高速で応答の良い走行が可能。
静かで低消費電力。長時間走行ができます。
基本的な解説、開発環境およびサンプルプログラムを収録したCDが付属します。

■ 販売価格
¥38,500(税込)
性能比較 |
ベーシックタイプ |
アドバンスドタイプ |
|
|
|
| サイズ | W105 D120 H62mm 245g | W115 D122 H40mm 245g |
| 使用マイコン | PIC16F84A クロック10MHz |
|
| ライン検出センサ | 赤外線フォトIC(浜松ホトニクス製) 3個 | |
| DCモータドライバ | FET Hブリッジ 2チャンネル 瞬間最大許容電流3A |
|
| モータ | マブチモータ FA-130タイプ(効率改善型) |
狭山精密 ギヤードモータ SCL16G-2501 DCコアレス0.55Wモータ |
| 減速機構 | ウォームギヤ使用 P-ROBOギヤBOX | スーパーギアヘッド ギヤ比19:1 |
| 車輪 | タミヤ トラックタイヤ | Oリング使用オリジナルホイール 直径30mm |
| 電源 | 標準は単3電池4本 |
|



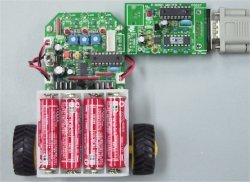
ベーシックタイプ、アドバンスドタイプ、どちらも共通のマイコンボードを使用しています。
P-ROBO2は、一般模型のように組立ての完了で終了ではありません。組たて完了はロボット体験のスタートにすぎません。ロボットを動かす知的な遊びによって、電子回路、機械、プログラミングの理解が深まります。
P-ROBO2は、回路図、使用部品表を付属CDに収録していますので、動作原理の理解や、次に自身でロボットを作成する際の設計の手助けになります。
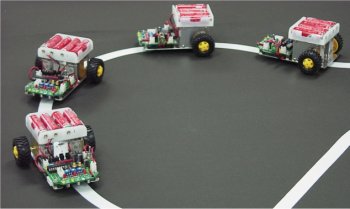
P-ROBO2には、ライントレースするためサンプルプログラムソースが付属CDに収録されています。
サンプルプログラムは、実践的なエンジニア学習が体験できるようにアセンブリ言語で書かれています。PICなど小規模マイコンのプログラム開発では、処理スピードが確実に計算でき(命令数を数えればそれに何秒かかるか計算できる)、無駄な命令をさせずに済むなど効率的な開発が可能なアセンブリ言語による開発が主流です。コード内は各所にコメント文を記入してありますので、理解の手助けになります。
サンプルプログラムの一部
;(c) Ftech Co., Ltd.
;---------************************************************---------
;
; 000番地 スタ-トプログラム
;
;---------************************************************---------
;
org 0x000 ; RESET vecter location
START
goto INIT ; イニシャライズへ
;
;---------************************************************---------
org 0x004 ; 割り込み処理ベクタ-
PER_INT_V ;
bcf INTCON, T0IF; タイマ0割り込みフラグクリア
movwf WBUF ; PUSH WREGの待避
swapf STATUS, W ; STATUS REGの待避
movwf SBUF ;
swapf PCLATH, W ; PCLATH REGの待避
movwf PBUF ;
movlw c_TMR0 ; TMR0カウント値プリセット
movwf TMR0 ;
call TIME_OUT ;割り込み処理ル-チンへ
swapf PBUF, W ; POP
movwf PCLATH ; PCLATH REGの復帰
swapf SBUF, W ;
movwf STATUS ; STATUS REGの復帰
swapf WBUF, F ;
swapf WBUF, W ; WREGの復帰
retfie ;
;
;---------************************************************---------
;********* Start program here *********
;---------************************************************---------
INIT
bcf _RP0 ; Bank 0
clrf INTCON ; 割込をすべて禁止
clrf PCLATH ;
bsf _RP0 ; Bank 1
clrf OPTION_R ; オプションレジスタ
;::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
; TRISA: ***00000 トライステートレジスタ A の設定
; ||||+- MOTOR R - 1 (out)
; |||+-- MOTOR R - 2 (out)
; ||+--- MOTOR L - 1 (out)
; |+---- MOTOR L - 2 (out)
; +----- PUSH SW (in)
;
movlw 0x10 ;
movwf TRISA ;
;::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
; TRIS B: 00011011 トライステートレジスタ B の設定
; |||||||+- Right Sensor (in)
; ||||||+-- NC (out)
; |||||+--- NC (out)
; ||||+---- Center Sensor (in)
; |||+----- Left Sensor (in)
; ||+------ LED6 右 (out)
; |+------- LED5 中 (out)
; +-------- LED4 左 (out)
;
movlw 0x19 ;
movwf TRISB ;
;::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
;
; プリスケラ-レ-ト1/256
; プリスケラ-割り当て TMR0
; TMR0ソ-スエッジ Non
; TMR0クロックソ-ス内部クロック
; PORTBプルアップ 未使用
;
movlw 0x87 ; int clock * (10M/4)/256 *102.4μs
movwf OPTION_R ; internall clk
;::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
; Initialize the Special function Registers (SFR) interrrupts
;::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
;
bcf _RP0 ; Bank 0
movlw 0x06 ; Aポート初期化(****:0110)
movwf PORTA ;
clrf PORTB ; Bポート初期化(0000:0000)
;
;::::::::::::::::::::::::
フラグの初期化
::::::::::::::::::::::::::
bcf f_TO_10ms ; インターバル 10msタイムアウトフラグ クリア
;
;
;
以下省略
|
また、C言語でのサンプルプログラムの提供も予定しております。
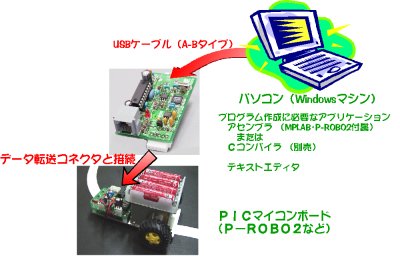
プログラム開発には、「パソコン」、プログラムをマシン語に変換する「コンパイラ」、出来上がったプログラムをP-ROBO2にデータ転送するための「プログラムライタ」が必要です。

USB通信タイプのF0279もあります。
P-ROBO2のプログラム開発に必要な機器
P-ROBO2の付属CD-ROMには、マイクロチップ社のPICマイコン開発環境「MPLAB」を収録しています。この中にはアセンブリ言語に対応したコンパイラ「MPASM」が収録されていますので、P-ROBO2を購入してすぐにプログラム作りが開始できます。
また、P-ROBO2用プログラムライタ「F0227」、「F0279」をラインナップ。RS232C、USBインタフェースを経由してP-ROBO2のマイコンに直接プログラムを書き込むことができます。基板からPICを抜き差しする必要はありません。
ヒント
最近のMPASM(アセンブラ)では、仕様変更によりorg命令でRAMのアドレスを指定するとコンパイルエラーになるようです。
修正例
;(c) Ftech Co., Ltd. ; RAM領域の割り当て org 0x0C ; WBUF res 1 ; ワークエリア SBUF res 1 ; ワークエリア PBUF res 1 ; ワークエリア ; 以下略 |
と書いた部分は
;(c) Ftech Co., Ltd. ; RAM領域の割り当て cblock 0x0c WBUF ; ワークエリア SBUF ; ワークエリア PBUF ; ワークエリア ; 略 endc |
と、cblock指定をして書くとエラーなくコンパイルできます。(2013.12)
開発環境に関して
新しい開発環境をCD-ROMに収録する許諾が得られなかったため、付属CD-ROMの開発環境はWindows10など新しいOSに対応しておりません。 お手数ですが、インターネットを利用して開発環境を入手してください。 プログラムの開発環境は、CPUメーカーのMicrochip社にて無償で利用できる環境が公開されています。WEBサイト:Microchip社
MPLAB IDE v8.92 や MPLAB X IDE をダウンロードしてご利用ください。
P-ROBO2には、電子回路の学習用に測定端子を設けてあります。チェックピンを追加すれば、テスタやオシロスコープを接続して動作原理の理解に役立ちます。
◆ プログラムライタ ◆


パソコンからP-ROBO2のPICマイコンへプログラミング書き込みをするためのプログラムライタです。専用ライタを使うとP-ROBO2にPICマイコンを装着したままプログラムエリアおよびデータエリアのフラッシュROM書き込みが可能です。
パソコンとRS232Cで通信する「F0227」とUSBで通信する「F0279」があります。
2010年12月下旬よりMicrosoft Windows Vista/7にも対応しました。出荷時期により付属CDがXPまで対応するバージョンのままの場合があります。その場合は恐れ入りますがダウンロードページのページから最新版を入手してください。
◆P-ROBO2 オンボードプログラムライタ
Model No.F0227 <完成品>
対応CPUが増えました。
PIC16F84、PIC16F84A、PIC16F627A、PIC16F628A、PIC16F648A
パソコンからRS232Cインタフェース経由でP-ROBO2のPICマイコンへプログラミング書き込みをするためのプログラムライタです。P-ROBO2にPICマイコンを装着したままプログラムエリアおよびデータエリアのフラッシュROM書き込みが可能です。
ロボット基板のPICマイコンの抜差し不要
専用コネクタをP-ROBO2に装着するだけ
外部電源不要 ロボット側から電源供給
RS232Cインターフェース利用
Microsoft Windows 98/ME/2000/XP/Vista/7のOSで動作
Windows 8/10での動作報告はありますが、100%動作の保証は致しかねます。
※RS232C用ケーブルは付属しておりません。別にRS232Cシリアルストレート(D-sub9ピン オス-メス)ケーブルをご用意ください。
※USB端子のみ装備したパソコンでご使用の際は、USB-COMポート変換器をご利用ください。
※Microsoft Windows 7 64ビット版OSでの動作試験済。
※P-ROBO F0125aには接続できません。F0125aにはシリアルライタF0201aをご利用ください。
※PICを取り外して書込みする場合は、お持ちのPICライタをご利用いただけます。
※回路を工夫すれば汎用のPIC16F84Aライタとしてもご利用いただけます。■ 販売価格
¥3,300(税込)
◆ P-ROBO USBライタ
Model No.F0279 <完成品>
対応CPUが増えました。
PIC16F84、PIC16F84A、PIC16F627A、PIC16F628A、PIC16F648A
パソコンからUSBインタフェース経由でP-ROBOおよびP-ROBO2のPICマイコンへプログラミング書き込みをするためのプログラムライタです。基板上にPICマイコンを装着したままプログラムエリアおよびデータエリアのフラッシュROM書き込みが可能です。
ロボット基板のPICマイコンの抜差し不要
専用コネクタを基板に装着するだけ
USBインターフェース利用 USB 1.1準拠
外部電源不要 USBバスパワーによる電源供給
Microsoft Windows 98/ME/2000/XP/Vista/7のOSで動作
Windows 8/10での動作報告はありますが、100%動作の保証は致しかねます。
Microsoft Windows 7で利用する場合の注意点
※P-ROBO、P-ROBO2どちらでも利用可能です。
※USBケーブルは付属しておりません。別にご用意ください。
※Microsoft Windows 7 64ビット版OSでの動作試験済。
※回路を工夫すれば汎用のPIC16F84Aライタとしてもご利用いただけます。■ 販売価格
¥5,170(税込)
ユーザー独自のPICマイコンボードでも、回路を工夫すればP-ROBO2用プログラムライタを接続して利用できるようになります。
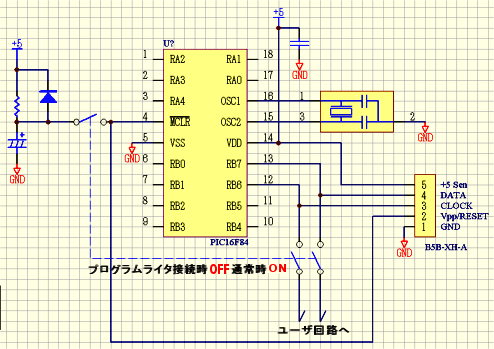
F0227、F0279を利用するための参考回路図
使用コネクタ:B5B-XH-AまたはS5B-XH-A(日圧製)
PIC16F84マイコンはROM書込み時に4,12,13ピンを利用しますので、プログラムライタ接続時にユーザー回路と切離して利用します。
「ライントレースロボット入門」(水川、春日、安藤 共著 オーム社刊)も参考にしてください。
※お客様の責任のもとでご利用ください。最終製品には利用しないで下さい。この回路を利用した結果による影響については一切の責任を負いかねます。
Microsoft Windows 8 でご使用になるには
※動作しないPCがあるかもしれませんのでご承知おきください。
P-ROBO USBライタ「F0279」用アプリケーションは付属CDのSetup.exeでインストールできます。USBライタ付属CDが F0297 Ver3.12 以前のバージョンの場合は、ダウンロードページから最新版のドライバと制御アプリケーションをダウンロードしてください。
USBドライバのインストールは、「Windowsのスタートアップ設定」でパソコンを再起動し、「ドライバー署名の強制を無効にする」を選択してスタートしてからインストールする必要があります。(ある程度のWindowsパソコンに対する知識が必要です)
P-ROBOオンボードプログラムライタ「F0227」をご利用の場合は、付属CDのSetup.exeでインストールできます。付属CDが F0227 Ver3.12 以前のバージョンの場合は、ダウンロードページから最新版制御アプリケーションをダウンロードしてください。
Windows 10での動作報告はありますが、100%動作の保証は致しかねます。
P-ROBO2用基板単体、ギヤBOX、ADVANCED台車の単体販売は中止しております。(2013.1)
デジタル回路、アナログ回路の両面からロボットを勉強したい方にお奨めのP-ROBO
"F0125a"の販売も在庫限りですが継続しております。
マイコンに論理回路・順序回路を拡張する技術、モータ駆動を通じたPWM技術、光センサを通じたアナログ技術の学習にご利用ください。
P-ROBOには、アセンブラ、C言語双方のサンプルプログラムソースが付属しています。
P-ROBO "F0125a"
◆訂正情報
- 訂正 - |
| 付属CDのサンプルプログラムコメント欄に誤りがありました。お詫びして訂正します。
正 プログラム命令部分の訂正はありません。 |
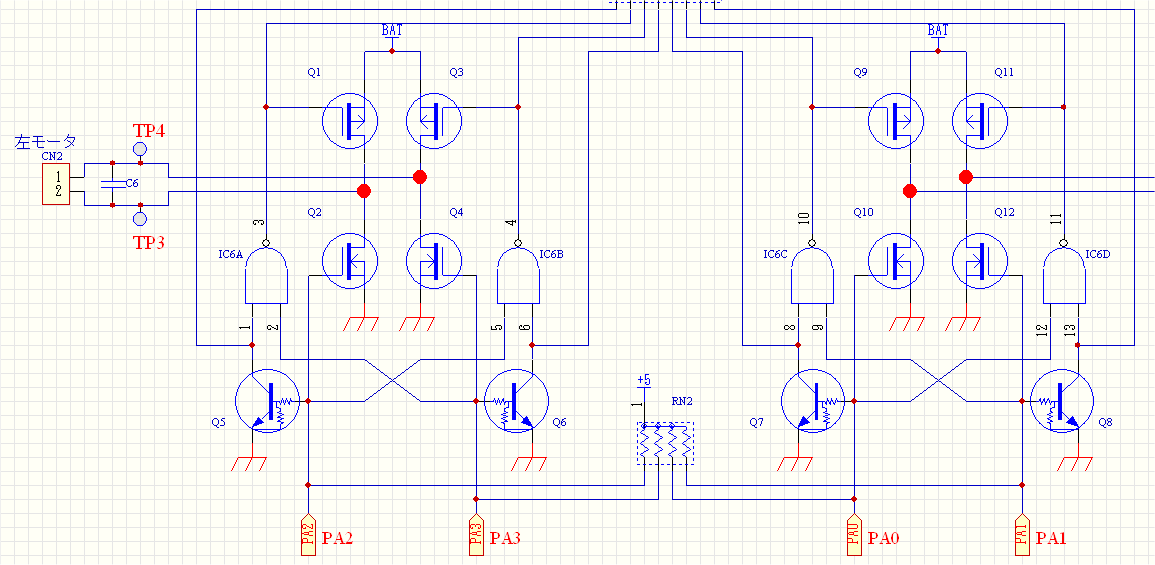
- 訂正 - |
| 付属CD Ver2.01以前で、マニュアルの表記に誤りがありました。お詫びして訂正致します。
正 回路図と基板とで、使用しているNAND回路のブロック、基板に印刷した部品番号に相違がありました(赤字、赤丸部分)。<注:初期バージョンではQ5~Q8はFETです。> |
- 訂正 - |
| 付属CD Ver1.08以前で、マニュアルの表記に誤りがありました。お詫びして訂正致します。
正 PB7 LED4(左) PB5 LED6(右)
サンプルプログラムのコメント欄
; TRIS B: 00011011 トライステートレジスタ B の設定
; |||||||+- Right Sensor (in)
; ||||+---- Center Sensor (in)
; |||+----- Left Sensor (in)
; ||+------ LED6 右 (out)
; |+------- LED5 中 (out)
; +-------- LED4 左 (out)
プログラム命令部分の訂正はありません。
|
 【拡大】
【拡大】
開発環境に関して
新しい開発環境をCD-ROMに収録する許諾が得られなかったため、付属CD-ROMの開発環境はWindows10など新しいOSに対応しておりません。 お手数ですが、インターネットを利用して開発環境を入手してください。 プログラムの開発環境は、CPUメーカーのMicrochip社にて無償で利用できる環境が公開されています。WEBサイト:Microchip社
MPLAB IDE v8.92 や MPLAB X IDE をダウンロードしてご利用ください。
2021.3