

ロボット応用例
複数のロボットを無線モデムでネットワークを構成すれば、サッカーロボット競技に取り組むことができます。協調制御、画像処理、通信制御などの研究にお役立て下さい。

エフテックロボットシリーズをベースにして、たくさんの方がマイクロマウス競技やロボトレース競技に参加しています。

マイクロマウス競技
トレースロボット競技
エフテックロボットシリーズは、競技会形式のメカトロニクスの実践教育ツールだけではなく、各種研究・実験のベースマシンとしてもご利用いただけます。
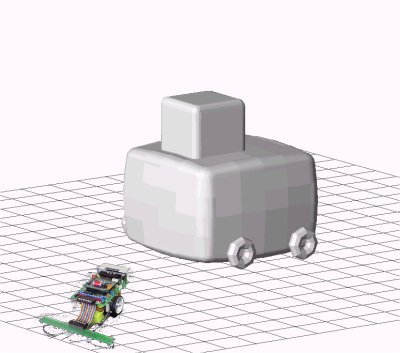
■ 大型ロボットのデバックに。
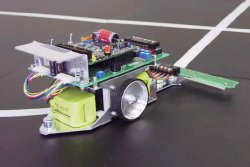
無人搬送車(AGV)やアミューズメント施設向けの大型ロボットを実際に走行させての実験は、広いスペースが必要であり、また多くのエネルギーを消費して非効率的です。デバック作業にエフテックの小型ロボットをお役立て下さい。
■ 管制などのアルゴリズム検証に
航空管制や遺伝アルゴリズムを用いたロボット制御にエフテックの小型ロボットをご利用いただくことも可能です。
画像認識を利用したロボットの制御
また、ロボットを改造して各種実験のベースマシンとしてもご利用いただけます。たとえば、P-ROBOトレースロボットのマイコン基板を利用してみましょう。
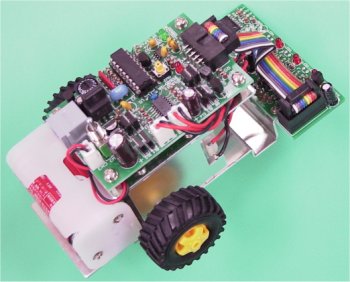
P-ROBO
人体検出センサを利用して、人が通ると明かりが灯る回路を考えてみました。
人体検出センサ
P-ROBOのモータドライブ回路は、FETのHブリッジ回路で構成されているので、モータドライブ実験装置が作れます。

モータドライブ実験装置
特に、マイクロマウスロボット、トレースロボットにはステッピングモータを搭載しており、正確な位置と速度の制御が簡単に実現できます。
※ ロボットの改造はお客様の責任の下に行ってください。
2002.12