

![]()
Model No. F0125a ピ ー ロ ボ |
|
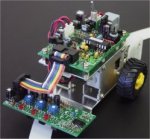
PICマイコンを搭載した学習教材用ロボット「P-ROBO」(ピーロボ)
ロボット制御を体験したい方へお奨め
デジタル回路、アナログ回路の両面からロボットを勉強したい方にお奨めのP-ROBO
"F0125a"。
マイコンに論理回路・順序回路を拡張する技術、モータ駆動を通じたPWM技術、光センサを通じたアナログ技術の学習にご利用ください。
アセンブラ、C言語双方のサンプルプログラムソースが付属しています。
メカトロニクス、マイコンプログラム学習の入門機
皆様よりご好評のP-ROBO。電子回路を中心としたハードウェア、マイコンプログラムによるソフトウェアの両面から学べます。
FET Hブリッジによるモータドライバを搭載しており、DCモータをPWM制御で効率よく正逆回転可能です。
PIC16F84Aマイコン採用
オンボードプログラミング方式
専用のプログラムライタを利用すればPICマイコンの抜き差しなしにプログラム書き換えが可能です。
工作教室、体験学習にもどうぞ
完成版と組立てキットをご用意。半田ゴテを利用した組立も体験できます。
工場出荷時にサンプルプログラムをPICマイコンに書込んであります。電池も付属していますので、買ってすぐにP-ROBOを楽しむことが可能です。
| ワンチップマイコンロボット「P-ROBO」は長岡技術科学大学川谷研究室殿(当時)と当社の共同開発品です。次世代技術を継承するエンジニアを「卵」の段階から「巣立ち」までを「知的な遊び感覚」で支援する教育教材ロボットです。
川谷助教授が福井大学に異動されましたので、現在P-ROBOに関する情報は福井大学川谷研究室の ホームページ にあります。 *「P-ROBO」のソフトウェアなど最新情報を川谷研究室のホームページでも公開しています。是非ご利用下さい。 |
◆ P-ROBO ◆
Model
No.F0125a <完成品>
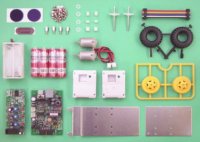
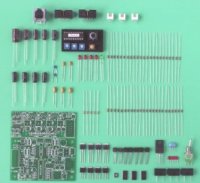
Model No.F0125a-11 ハーフキット <メカ部は組立キット・マイコンボード組立済>
Model No.F0125a-00 フルキット <メカ部、マイコンボードとも組立キット>
完成品、メカ部のみ組立キットとなった“ハーフキット”(半田付け作業不要)、全てが組立キットの“フルキット”(半田付け作業必要)の3種類の中からお選びいただけます。
ロボットマイコン制御入門版
効率改善特注マブチモータ(仙台「メカトロで遊ぼう会」梵天丸用)使用
基本的な解説およびサンプルプログラムを収録したCDが付属します。
■ 販売価格
完成品 ¥16,500(税込)
ハーフキット ¥14,300(税込)
フルキット ¥13,200(税込)
在庫のみの取り扱いです(2015.2)

P-ROBOは、一般模型のように組立ての完了で終了ではありません。組たて完了はロボット体験のスタートにすぎません。ロボットを動かす知的な遊びによって、電子回路、機械、プログラミングの理解が深まります。
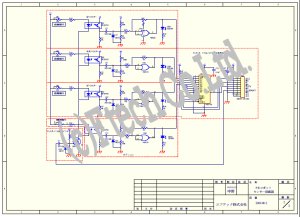
P-ROBOには、回路図、使用部品表を付属CDに収録していますので、動作原理の理解や、次に自身でロボットを作成する際の設計の手助けになります。
P-ROBOには、ライントレースするためサンプルプログラムソースが付属CDに収録されています。
サンプルプログラムは、「C言語」と実践的なエンジニア学習が体験できるように「アセンブリ言語」で書かれています。コード内は各所にコメント文を記入してありますので、理解の手助けになります。
サンプルプログラムの一部
//========================================================
// P-ROBO サンプルプログラム(main.c) ver.1.0
// CPU : PIC16F84
// Last Up date : 1998.8.27
// Copyright : 長岡技術科学大学川谷研究室
//========================================================
//===============================================
// メイン関数
//===============================================
void main(){
DISABLE_INTERRUPTS(GLOBAL); // 割込をすべて不許可
SETUP_COUNTERS(RTCC_INTERNAL,RTCC_DIV_256); // RTCC のセットアップ
SET_RTCC(c_TMR0); // int clock = (10M/4)/256 = 102.4μs
SET_TRIS_A(0xe0); // TRIS A: ***00000 トライステートレジスタ A の設定
// ||||+- MOTOR R - 1 (out)
// |||+-- MOTOR R - 2 (out)
// ||+--- MOTOR L - 1 (out)
// |+---- MOTOR L - 2 (out)
// +----- USER LED (out)
SET_TRIS_B(0xf4); // TRIS B: 11110100 トライステートレジスタ B の設定
// |||||||+- 74HC166 clock (out)
// ||||||+-- 74HC166 shift/load (out)
// |||||+--- 74HC166 read (in)
// ||||+---- sensor drive (out)
// ++++----- 16進 DIP SW (in)
RA = 0x1f; // Aポート初期化(***1:1111)
RB = 0x00; // Bポート初期化(0000:0000)
// フラグの初期化
#asm
BCF f_TO_10ms // インターバル 10ms タイムアウトフラグ クリア
BCF f_TO_20ms // インターバル 20ms タイムアウトフラグ クリア
BSF f_SENSOR // 赤外LEDセンサ ON
#endasm
// 割込みスタート
ENABLE_INTERRUPTS(RTCC_ZERO); // RTCC 割込許可
ENABLE_INTERRUPTS(GLOBAL); // 割込許可
TIMER_CLR(); // タイマ(1sec,2sec)をクリア
ULED_ON(); // UserLED ON
WAIT_1S(); // 全体が安定するまで1秒待つ
ULED_OFF(); // UserLED OFF
r_MOTOR_DATA=0xff; // モータ停止設定
ERLED_OFF(); // 赤外LEDセンサ OFF
以下省略 ------------------------------------------ アセンブラ版 MAIN:
;------- 割込みの設定 -------
CLRF INTCON ; DISABLE GLOBAL_INTERRUPTS
CLRWDT
MOVLW B'10000111'
; | | |||+- RTCC_DIV_256
; | | ||+-- RTCC_DIV_256
; | | |+--- RTCC_DIV_256
; | | +---- prescaler assigned to TMR0
; | +------ TMR0 clock source (internal)
; +-------- PORTB pull-up disabled
OPTION
MOVLW c_TMR0 ; int clock = (10M/4)/256 = 102.4 μs
MOVWF TMR0
;------- ポート入出力設定 -------
MOVLW B'11100000'
; ||||+- MOTOR R - 1 (out)
; |||+-- MOTOR R - 2 (out)
; ||+--- MOTOR L - 1 (out)
; |+---- MOTOR L - 2 (out)
; +----- USER LED
TRIS PORTA
MOVLW B'11110100'
; |||||||+- 74HC166 clock
; ||||||+-- 74HC166 shift/load
; |||||+--- 74HC166 read
; ||||+---- sensor drive
; ++++----- 16進 DIP SW
TRIS PORTB
;------- ポート初期化 -------
MOVLW B'00011111' ; Aポート = 0001 1111
MOVWF PORTA
MOVLW B'00000000' ; Bポート = 0000 0000
MOVWF PORTB
CLRF r_PWM_R_SET
CLRF r_PWM_L_SET
;------- 変数,フラグの初期化 -------
BCF f_TO_10ms ; インターバル 10ms タイムアウトフラグ クリア
BCF f_TO_20ms ; インターバル 20ms タイムアウトフラグ クリア
BSF f_SENSOR ; センサ 赤外LED ON
;
;
以下省略
|
プログラム開発には、「パソコン」、プログラムをマシン語に変換する「コンパイラ」、出来上がったプログラムをP-ROBOにデータ転送するための「プログラムライタ」が必要です。
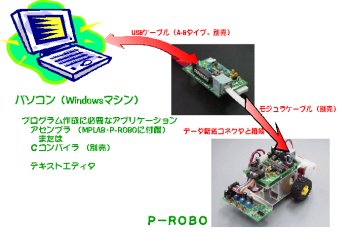
P-ROBOの付属CD-ROMには、マイクロチップ社のPICマイコン開発環境「MPLAB」を収録しています。この中にはアセンブリ言語に対応したコンパイラ「MPASM」が収録されていますので、P-ROBOを購入してすぐにプログラム作りが開始できます。
また、P-ROBO用プログラムライタ「F0201a」、「F0279」をラインナップ。RS232C、USBインタフェースを経由してP-ROBOのマイコンに直接プログラムを書き込むことができます。基板からPICを抜き差しする必要はありません。
◆ OPTION ◆ |
|
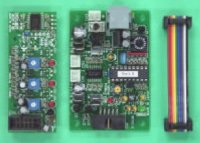
◆ P-ROBO USBライタModel No.F0279 <完成品> 対応CPUが増えました。 パソコンからUSBインタフェース経由でP-ROBOおよびP-ROBO2のPICマイコンへプログラミング書き込みをするためのプログラムライタです。基板上にPICマイコンを装着したままプログラムエリアおよびデータエリアのフラッシュROM書き込みが可能です。 ロボット基板のPICマイコンの抜差し不要
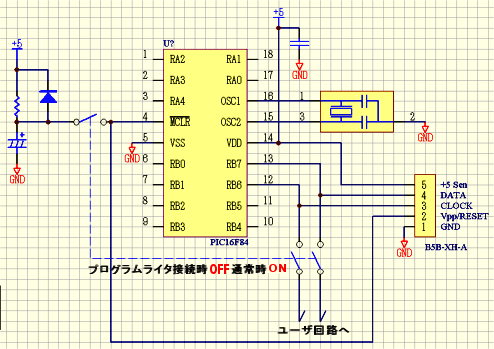
ユーザー独自のPICマイコンボードでも、回路を工夫すればP-ROBO用プログラムライタを接続して利用できるようになります。
使用コネクタ:B5B-XH-AまたはS5B-XH-A(日圧製) PIC16F84マイコンはROM書込み時に4,12,13ピンを利用しますので、プログラムライタ接続時にユーザー回路と切離して利用します。 +5V単電源です。 「ライントレースロボット入門」(水川、春日、安藤 共著 オーム社刊)も参考にしてください。
Microsoft Windows 8 で「F0279」をご使用になるには |
<保守扱い品>
◆P-ROBO シリアルライタModel No.F0201a <完成品> パソコンからRS232Cインタフェース経由でP-ROBOのPICマイコンへプログラミング書き込みをするためのプログラムライタです。P-ROBOにPICマイコンを装着したままプログラムエリアおよびデータエリアのフラッシュROM書き込みが可能です。 ロボット基板のPICマイコンの抜差し不要 PIC16F84、PIC16F84A専用です。
|


2021.3